天博全站官网登录
School of Computer Science and Technology
国家示范性软件学院
National Pilot School of Software Engineering
面向国家重大战略需求,瞄准国际学科前沿,紧跟区域经济发展,以软件工程和计算机科学与技术一流学科建设为牵引,以智能软件技术创新和智能系统研发为目标,致力于智能软件基础理论、关键技术和智能系统建设相关领域的科学研究与人才培养工作,取得了一系列重要成果。
学术研究成果
研究所在动态智能化软件工程技术方向上取得了特色鲜明、优势明显的研究成果,具体包括:1)建立动态软件体系结构、智能化软件开发方法、软件在线演化与自适应机制;2)研究语义理解与分析技术、智能交互、机器人系统和智能信息处理等技术;3)解决复杂动态环境中软件系统的工程化和智能化问题等。 研究所教师承担了一批国家863计划项目、国家重点研发计划项目、国防973重点项目、国家自然科学基金、国家留学归国人员基金、国防装备型号项目、国防预研项目,以及与中电集团、中航工业集团、航天科技集团、华为、腾讯、阿里、中兴等研究所和企业开展的合作研发项目100余项,在国内外重要期刊和会议上发表学术论文300余篇,授权和转化专利以及软件著作权100余项,在相关研究领域产生了重要的国际国内影响力。
1.基于多智能体的自适应过程模型与元搜索框架模型
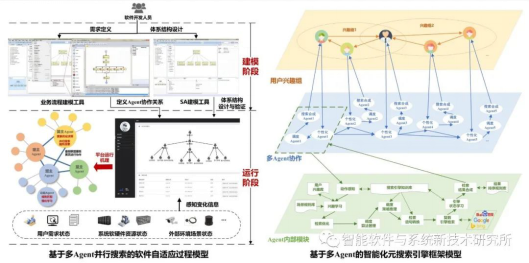
结合多智能体系统的并行处理、智能自治等优势,建立了基于多智能体的自适应过程模型,建立了智能化元搜索引擎体系结构。支持用户自主选择成员搜索引擎,兼顾用户兴趣及相关性的结果排序;智能化兴趣挖掘与相似用户信息推荐,为互联网用户提供个性化信息检索服务,可扩展到旅游、学术、电商等垂直领域。
2.面向医疗大数据的智能化分析与决策支持平台
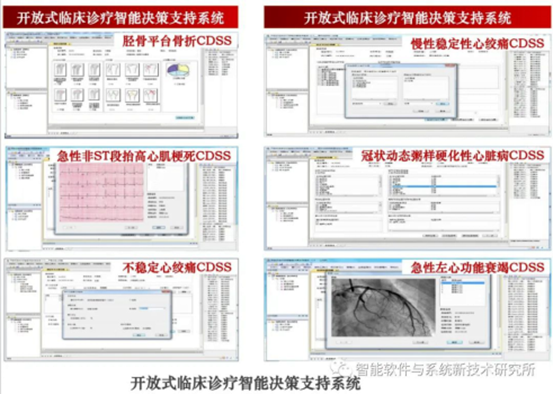
形成基于多智能体的智能化数据处理与决策支持技术,成功应用于分析医疗大数据价值提供个性化诊疗服务。依据临床路径,规范化医师诊疗行为,同时模拟医学专家的决策过程,提出科学的、具有执行效果的诊疗方法。系统还集成临床指南检索与查询、诊疗方案反馈等应用模块,采用开放式管理平台,易于更新知识和拓展新病种。
3.基于多智能体的复杂软件演化模型及支撑环境
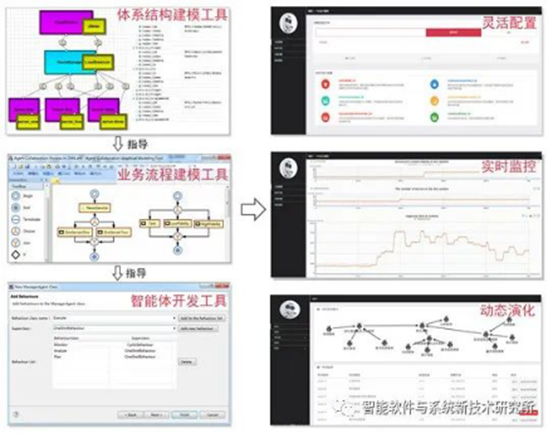
建立基于多智能体的软件动态体系结构模型,采用模型驱动的软件构造方法,敏捷构造开放环境下软件系统;研究变化建模、层次感知、智能决策等技术方法,实现软件结构、行为等多方面的动态演化。
4.面向自然语言交互的智能问答系统

针对复杂自然语言文本信息抽取提出了多阶语义关系抽取方法,基于分布式知识图谱构建了知识抽取、知识融合和知识演化模型,研发了面向自然语言交互的智能问答系统。系统实现了联网数据实体关系抽取、语义数据存储与检索等关键技术,核心模块包括:①联网数据实体关系抽取模块;②语义数据存储和检索模块;③语音识别和语音合成模块;④自然问句理解和转换模块。
5.情报综合整编处理服务系统
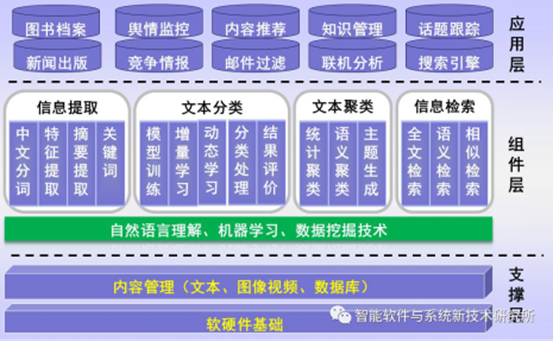
利用自然语言处理和机器学习技术实现对于中英文跨语言文本的分析、信息抽取和检索,能够实现面向特定领域需求的跨语言文本情报分类、文本聚类、关键词和摘要抽取、跨语言检索和相似度检索等;利用联机分析和面向数据仓库的多维可视化技术实现了结构化数据的多维数据模型和综合展示模式,支持特定领域情报的上卷、下钻和联机统计分析;最后实现了一套综合整编系统,辅助情报处理人员快速有效准确的完成情报分析工作。
6.基于课程知识图谱的智能问答助教“网小西”

系统实现针对特定领域知识的人机对话和智能问答交流。系统核心模块包括:①课程知识抽取模块,从授课知识、课程作业和考试等文字内容中抽取中与课程内容相关的实体和关系。②课程知识图谱模块,按照课程知识关系构建课程知识图谱,实现了关联数据的语义图存储模式。③问答交互模块,负责接收学生问题并将问题转换为QA列表相似性匹配问题,并将问题和答案存储到QA列表中供后续查询使用。
7.口腔咽喉狭小空间双目内窥镜成像与导航定位系统
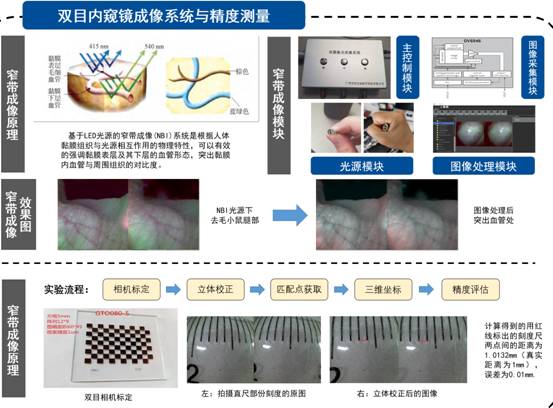
所研发的口腔咽喉狭小空间双目内窥镜成像与导航定位系统,可实现精度为毫米级的手术钳精确定位和病灶分割,支持面向病灶的导航服务,突破了狭小空间特征提取难、匹配难等基础关键问题,该成果已在手术机器人精细化导引、病灶三维分割等上面开展示范应用。
8.基于深度学习的手语及行为识别技术
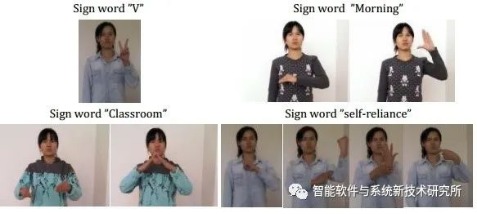
在手语和行为识别方面,通过分析不同国家手语特性,结合手语动作特点,先后提出,基于自适应时空图的行为过程表示框架及融合手势、眼动、语音的多通道交互融合方法,在多类别手语识别(超过100多类手语动作)以及其它动作识别(人机交互动作)上表现良好。该研究成果在2016年ICPR手势识别竞赛中取得全球第三名,,目前团队在手语动作识别领域已经有一定影响力,发表多篇高水平论文,相关研究成果已逐步在服务机器人等多个领域开展示范应用。
9.嵌入式机器视觉系统
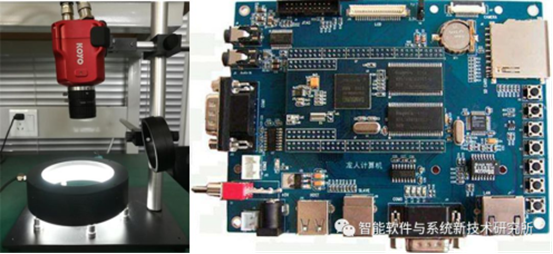
该研究以工业4.0需求为背景,旨在利用视觉系统对工业生产中产品的缺陷、污点、划痕等进行智能检测,同时研究基于视觉传感器的三维引导技术,与机器人系统相结合实现工业现场的引导、抓取。目前所研制的嵌入式智能视觉传感器(应用于工业现场,进行缺陷等检测)已进入小批量生产,可极大的提升工业现场的工作效率,为工业4.0的全面实现提供有力支持。
10.自然场景环境感知与理解关键技术

基于视觉等传感器对自然场景中的人、物感知与理解是机器人等智能装备执行高级任务的基础,本技术旨在以视觉传感器构建自然场景的语义化结构表示,形成可描述自然场景中不同类对象位置、属性、关系的三维场景结构化语义知识图。基于该语义知识图可支撑自然语言引导、问答等高级任务的智能化执行。目前团队在该领域已发表多篇高水平论文,相关研究成果已在服务机器人上开展示范应用。
11.高精度多目标定位追踪系统

目标定位追踪系统在许多实际应用中具有重要的意义。目前,大多数被动式定位系统依靠现成的商用产品来构建较廉价的系统,并且已经具有相对较高的精度,但存在场景变换后需要重新训练数据,重新搭建的问题。本研究设计并实现了一个支持多目标定位的智能化系统,可以应用于多种复杂场景。根据不同场景的不同目标,系统可以自动调整不同的信号处理算法,以保证检测精度。该系统软件具有高精度(可以实现厘米级的检测),高实时性(毫秒级响应),用户隐私性好和自主化程度高等特点。

